3D Liver models
This asset is a collection of detailed 3D liver and associated organ models. Each organ is available in high-resolution with multiple textures for rendering, as well as low-resolution versions for use in physics simulations (deformations or collision models). The models are integrated into SOFA simulation scenes and can be explored through several Unity examples provided in this asset.
Here is the list of organs present in this asset:
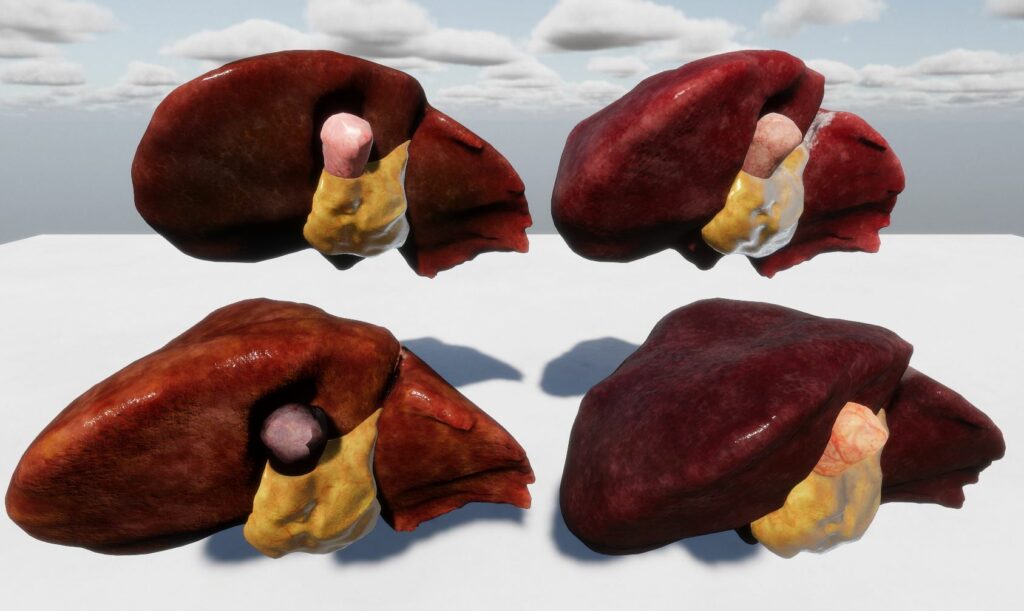
- Liver (2 versions) with 4 different textures
- Gallbladder with 3 different textures
- Fat volume around the gallbladder
- Intestine (rough model)
- Cavity
- Soft fat tissue (work in progress)
Several version of 3D tetrahedral mesh of the Liver, Gallbladder and Fat tissues are also provided for tetrahedron FEM modelisation.
Several examples are available in the asset:
- Example_01_Organs_GridTopologySimulation
A demonstration of grid-based topologies for organ simulations. - Example_02_Organs_VolumeSimulation
Showcasing volume-based deformation of the liver model using the tetrahedral mesh. - Example_03_Organs_withTool
Showcasing interaction between the liver, its surrounding organs and a cautery tool. - Example_04_Organs_Geomagic
Same as scenario 03 but the device is controlled by Geomagic Touch Haptic device. - Example_05_Liver_withFatTissues
Example of simulation with addition thin layer of fat tissues connecting the liver and the intestine (work in progress)
01. Example_01_Organs_GridTopologySimulation
This first scene demonstrate how to simulate all 3D models in SOFA and render them in Unity with a suitable FPS for an interactive simulation.
In this example, each organ is simulated using a SOFA SparseGridTopology and HexahedronFEMForceField (see figure 2 below). Visual models are then mapped onto those mechanical models. Fine models are used to render the visual models with their corresponding textures.
In the other hand, rough models are used to simulate the collision between the organs (see figure 3 below).
In this example only gravity is applied to the scene.
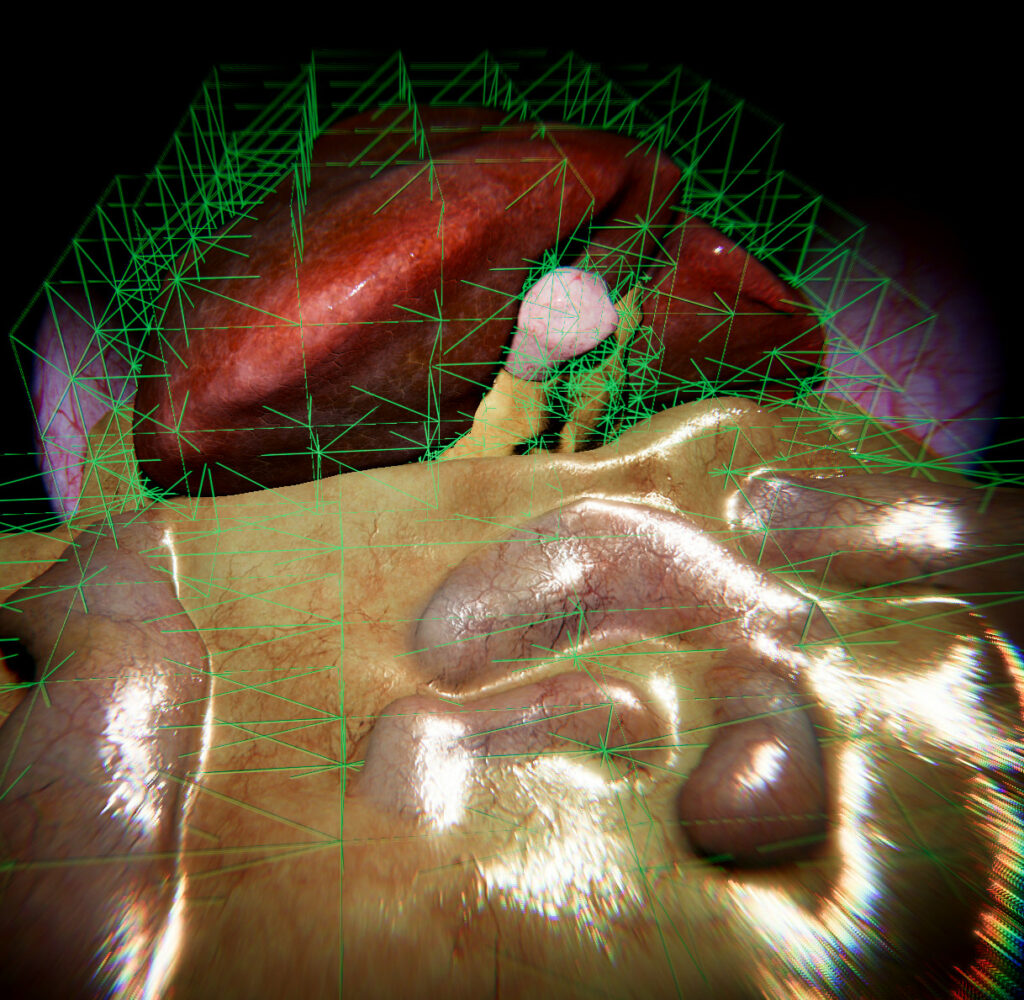
Figure 2: Hexahedron FEM Grids display
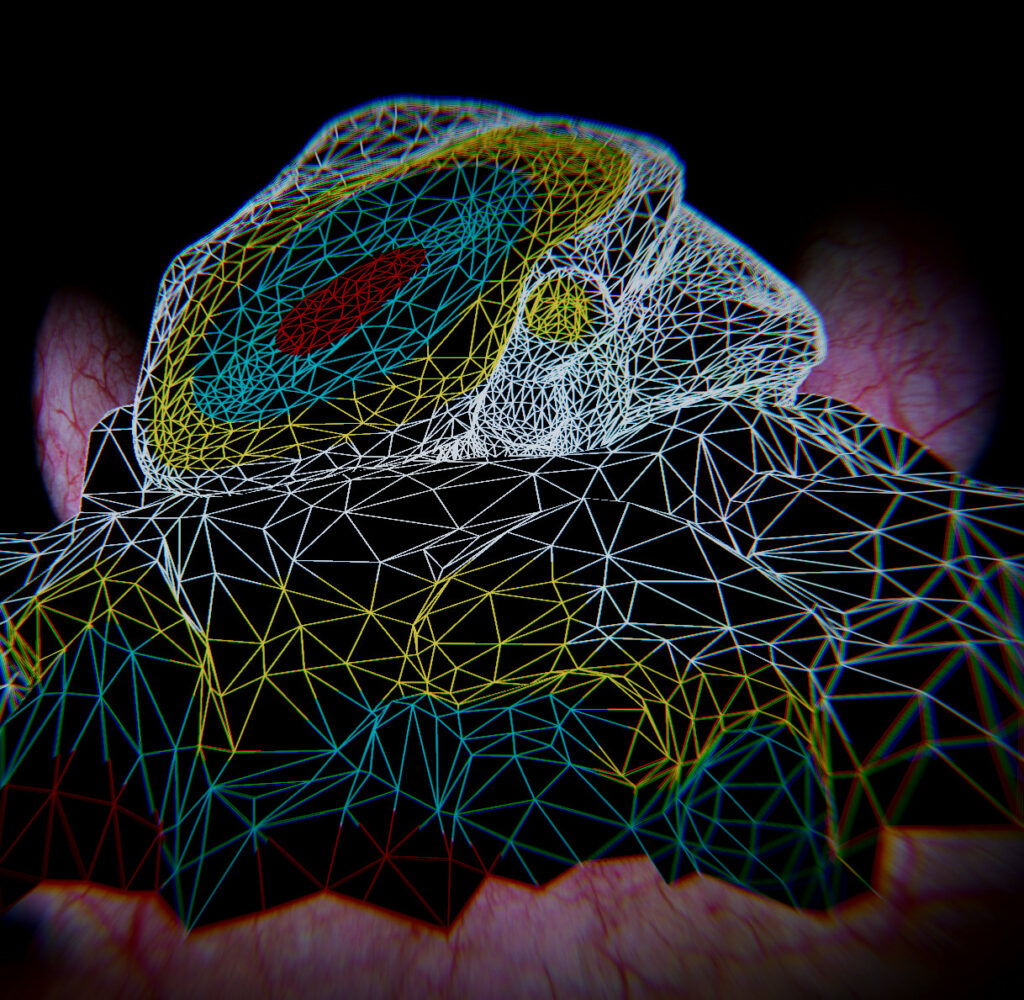
Figure 3: Reduced meshes for Collision Model
02. Example_02_Organs_VolumeSimulation
In this second scene, the Liver, gallbladder, and fat tissue are modeled using high-resolution tetrahedral volume meshes. The liver mesh (~8K tetrahedra) and gallbladder mesh are simulated using a TetrahedronFEMForceField for realistic soft tissue deformation. The fat tissue surrounding the gallbladder also uses a tetrahedral mesh to simulate its physical behavior. Surface mapping is applied to generate the triangulation for the outer surfaces of these models, which are used for both visual rendering and collision detection. High-resolution textures are mapped onto these surfaces for enhanced visual detail.
The intestine, on the other hand, is simulated using a SOFA SparseGridTopology combined with a HexahedronFEMForceField (see Figure 2 below), ensuring that the mechanical deformation of the intestine is lightweight but still interactive. Fine visual models with textures are mapped onto the simulated intestine for proper rendering in Unity.
As in the first example, a constant external force (gravity) is applied to simulate organ interaction under realistic conditions, with the volume meshes demonstrating highly detailed deformations.
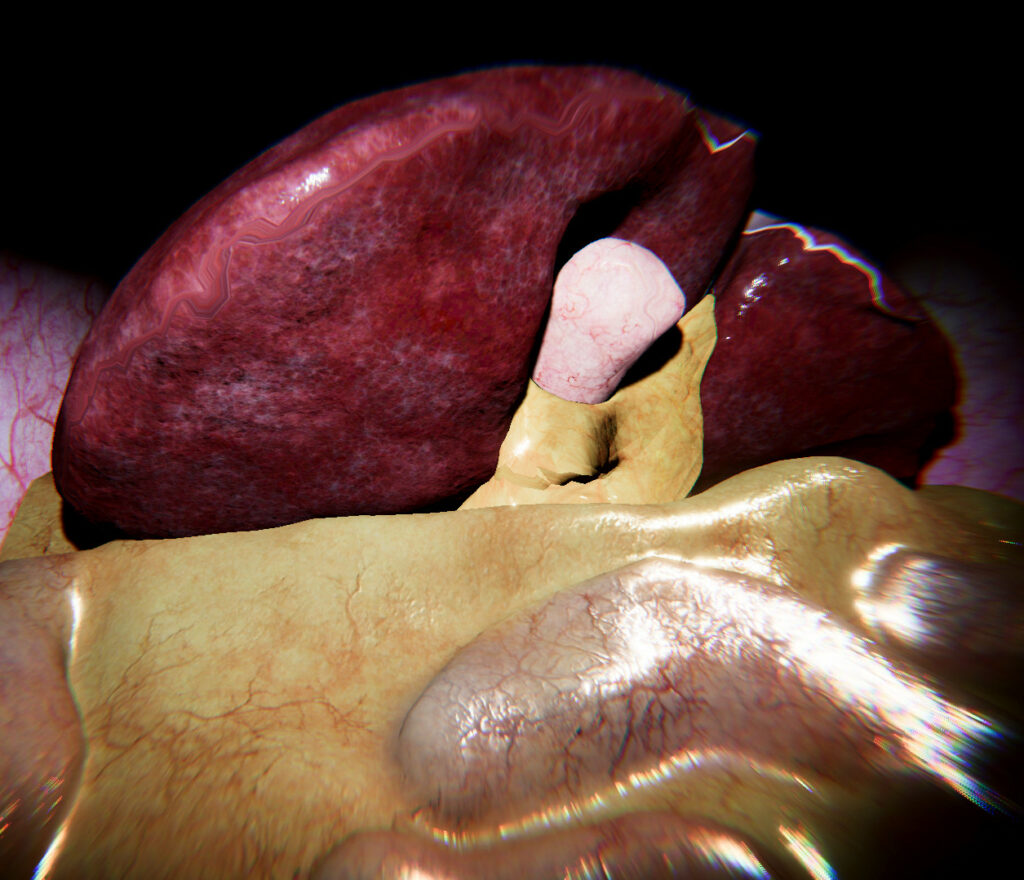
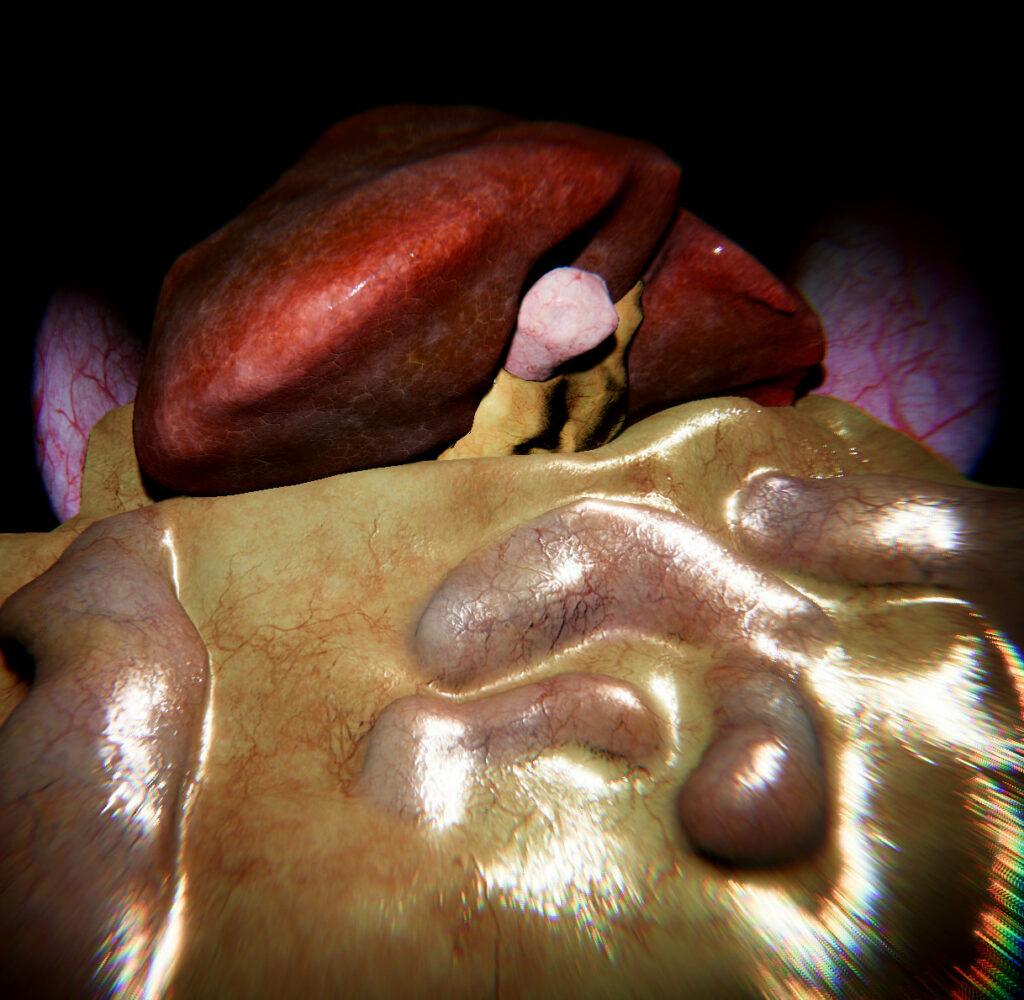
Figure 1:Visual Models with texture
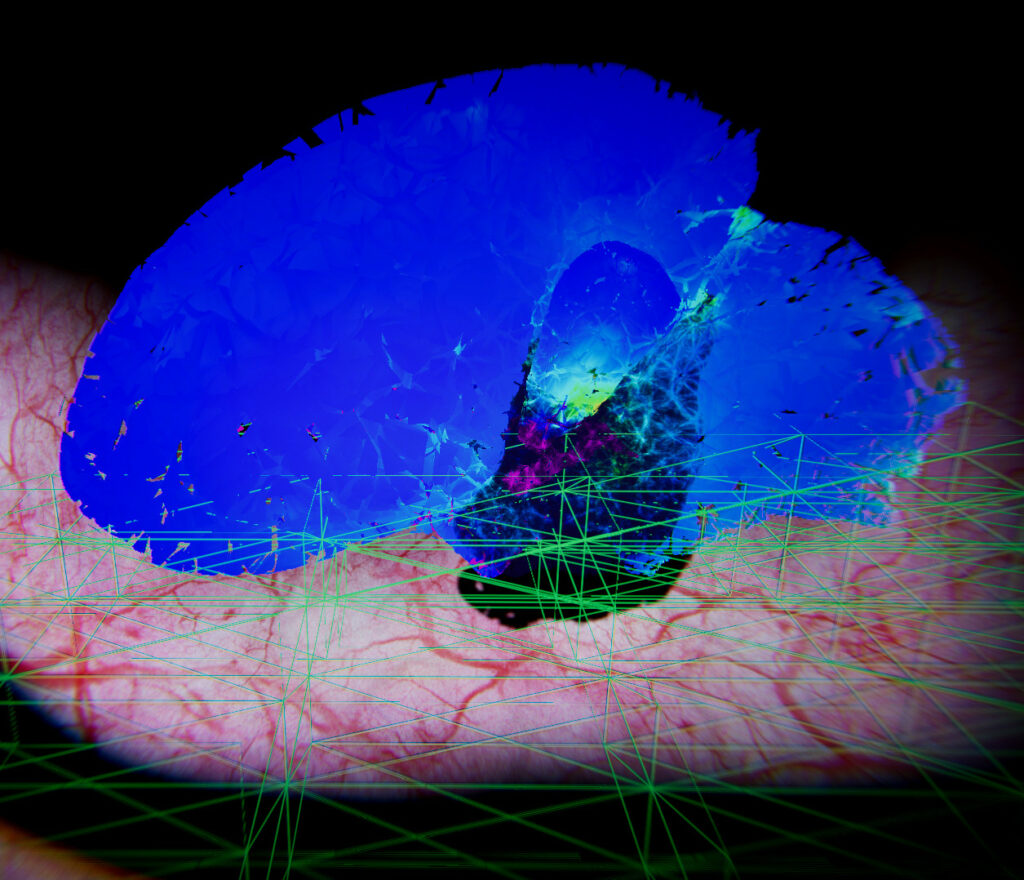
Figure 2: Hexahedron FEM Grid and Tetrahedron Von Mises stress Display
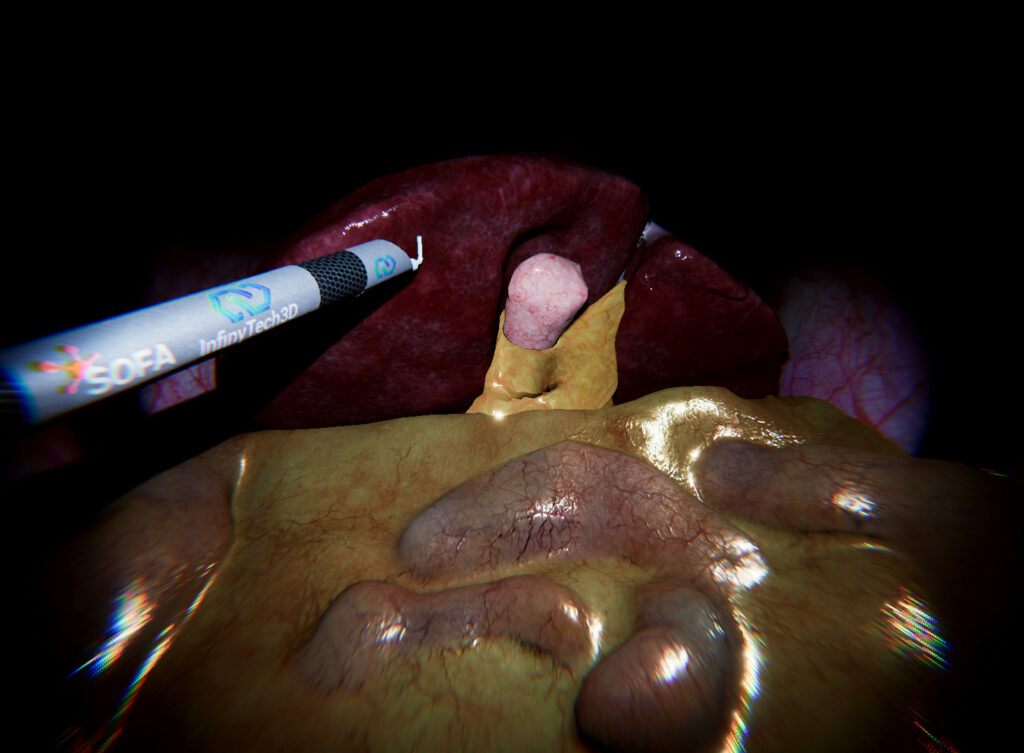
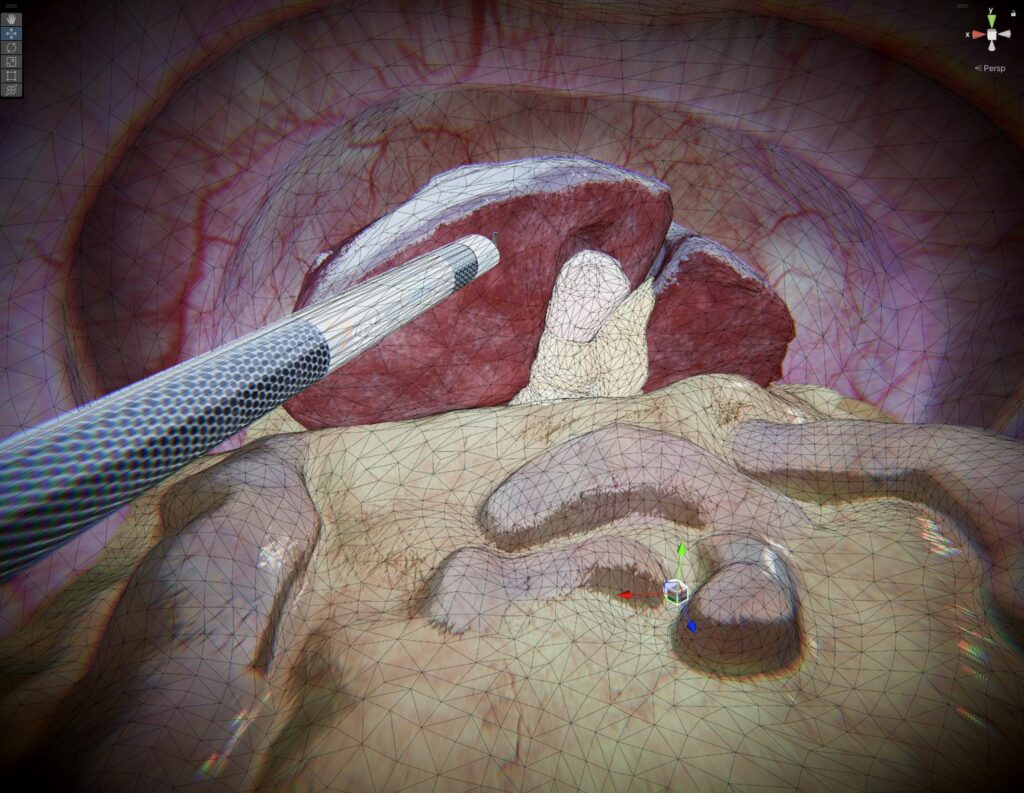
03. Example_03_Organs_withTool
In this third scene, the mechanical modelization remains the same as in Example_02_Organs_VolumeSimulation, where the liver, gallbladder, and fat tissue are represented using high-resolution tetrahedral volume meshes with TetrahedronFEMForceField for soft tissue deformation. The intestine continues to use SparseGridTopology with HexahedronFEMForceField for efficient yet interactive simulation.
A Cautery device has been introduced into the scene to simulate collision interactions with the organs. The Cautery device is controlled using a SofaRigidController, similar to the controller in the previous organ examples (see Example_03_Organs_SphereCollision). This setup allows users to manipulate the tool in real time and interact with the soft tissues, simulating contact and collision behavior with the liver, gallbladder, and surrounding organs.
The Cautery device can be controlled using the following keyboard keys:
- Key 8: Move up Key 7: Rotate up
- Key 2: Move down Key 9: Rotate down
- Key 4: Move left Key 1: Rotate left
- Key 6: Move right Key 3: Rotate right
- Key 5: Move forward Key +: Rotate forward
- Key 0: Move backward Key –: Rotate backward
The SofaRigidController must be attached to a controller component and the target SofaMeshneed to be connected with the ToolController SofaMesh of the Cautery device within the scene hierarchy (see Figure 1).
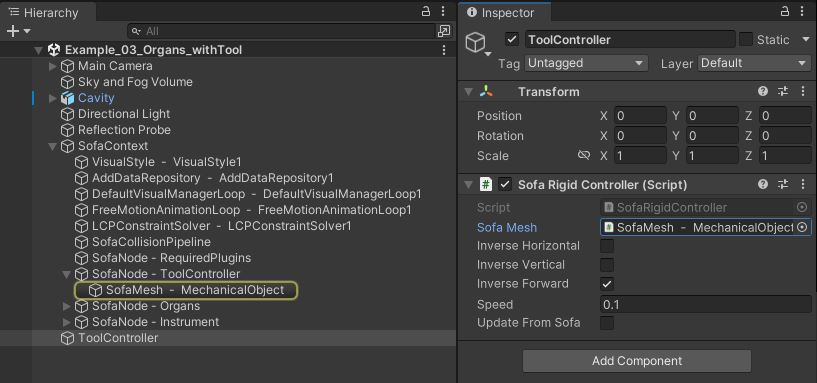
Figure 1: SofaRigidController Inspector. This component control the motion of a SOFA rigid DOF using keyboard
04. Example_04_Organs_Geomagic
This example is identical to Example_03_Organs_withTool, but instead of using keyboard control, the Cautery device is controlled by the Geomagic Touch haptic device. This allows users to physically interact with the organs, providing force feedback for a more immersive and realistic simulation experience.
The haptic integration enhances the realism by simulating the feel of surgical manipulation, giving users tactile feedback when the tool interacts with the soft tissues.
Please note that the Geomagic Touch integration requires the purchase of the Geomagic Touch asset, which can be found here: Geomagic Touch Asset.
05. Example_05_Liver_withFatTissues
This example is a proof of concept demonstrating an advanced simulation setup where the mechanical modelization remains the same as in previous examples, utilizing volumetric meshes for the liver, gallbladder, and fat tissue, while the intestine uses SparseGridTopology.
In addition to this, a thin fat tissue layer is modeled between the liver and the intestine, represented by a triangular surface mesh. This surface is simulated using a TriangularFEMForceField to capture the soft and flexible behavior of the fat tissue. This approach illustrates how different mesh types can be combined for complex tissue interactions within the scene.
This proof of concept highlights the potential for more detailed anatomical modeling in future projects.
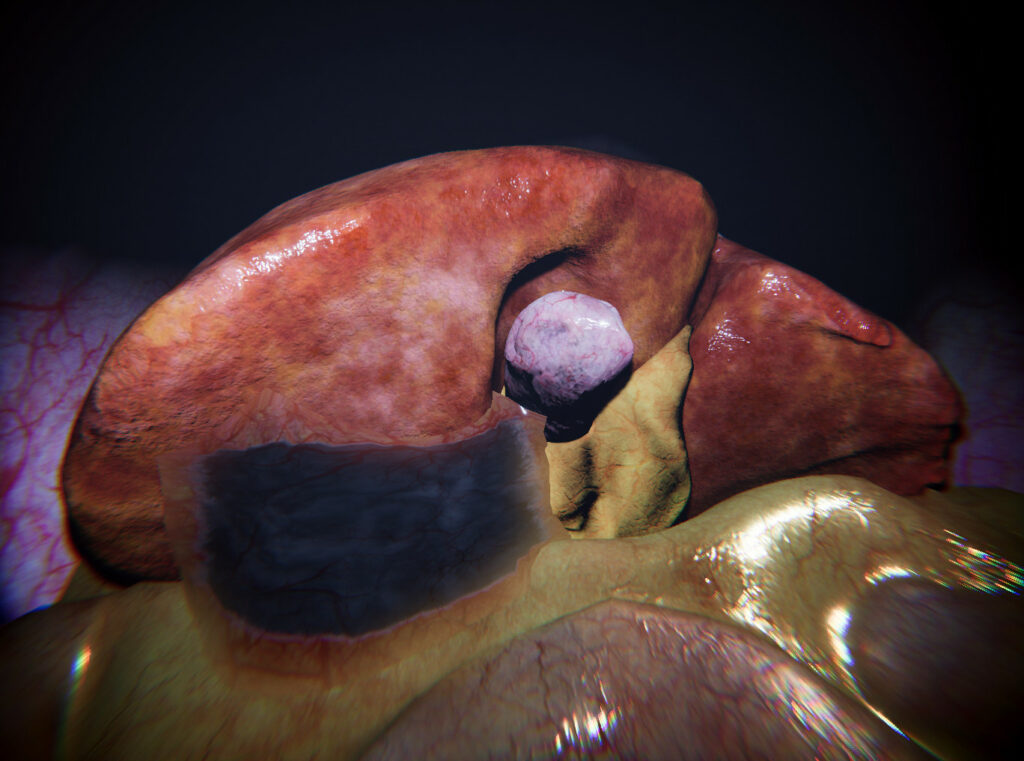
Figure 1: Fat tissue transparent Visual Model
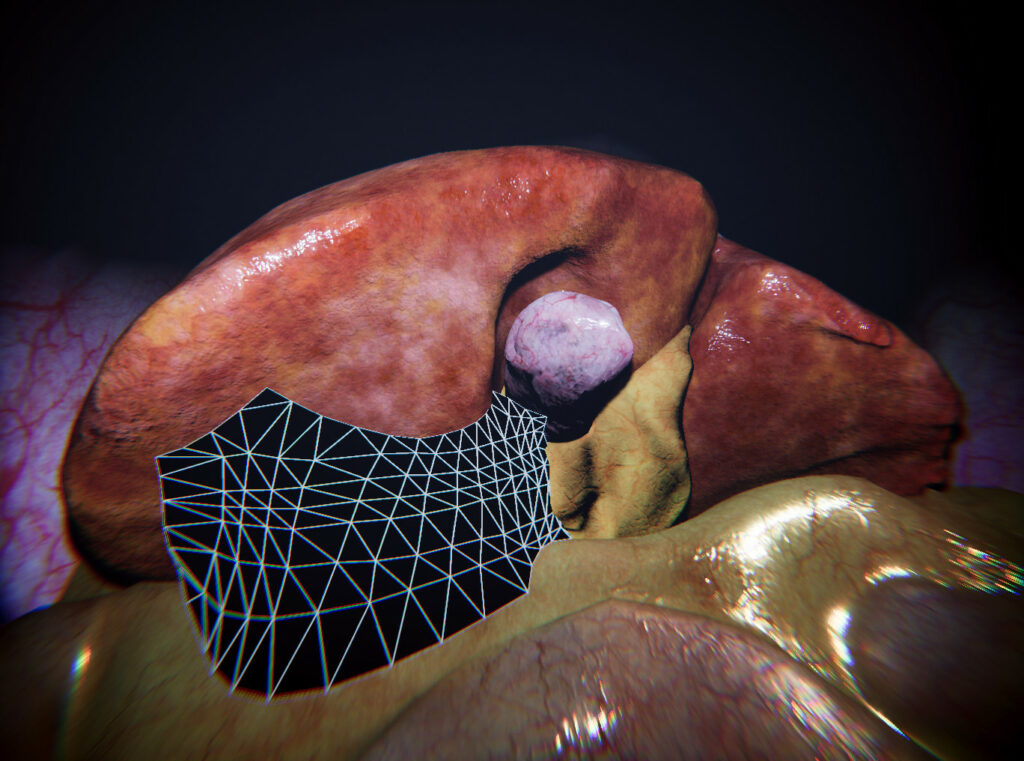
Figure 2: Triangular FEM tissue model