Geomagic Haptic Tool Controller
This asset allows to use SOFA Geomagic plugin inside Unity3D and track Geomagic Touch haptic tool position, orientation and its buttons activation.
This means it is possible to activate Unity C# scripts when haptic tool button is pushed and map the device on any 3D object.
This feature is available in the trial version but for extended academic or commercial use, this feature is subject to an additional license. See the licenses page for more details.
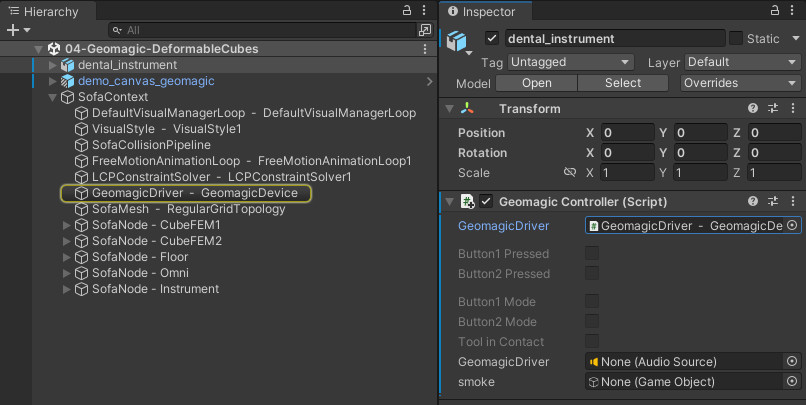
To use the SOFA Geomagic driver, add the GeomagicController script on the Unity GameObject to map to the device. Using the UI, several options can be set:
- GeomagicDriver: Link to the SOFA GeomagicDriver component. This input is mandatory.
- AudioSource: sound to be played when button1 is pressed.
- Smoke: particle system or effect to be activated when button1 is pressed.
Status checkboxes:
- Button1/Button2 pressed: will be set to true when button is pushed.
- Button1/Button2 Mode: toogle status, will switch status at each button push.
- Tool in Contact: will be set to true when collision is computed between the tool and other objects.
Geomagic Demo Scenes
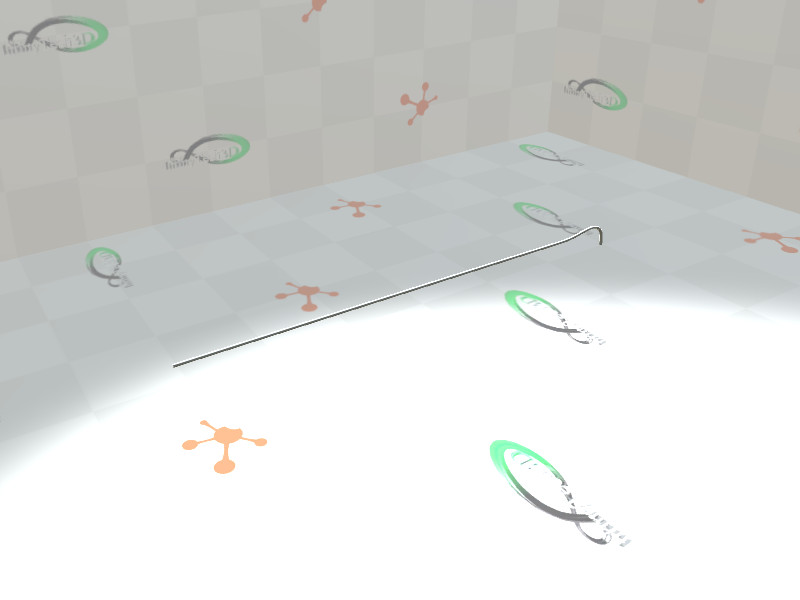
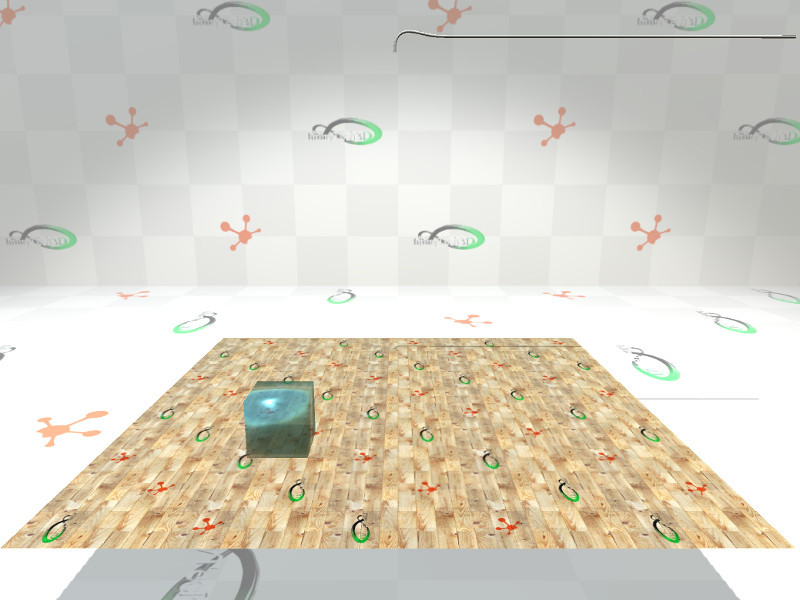
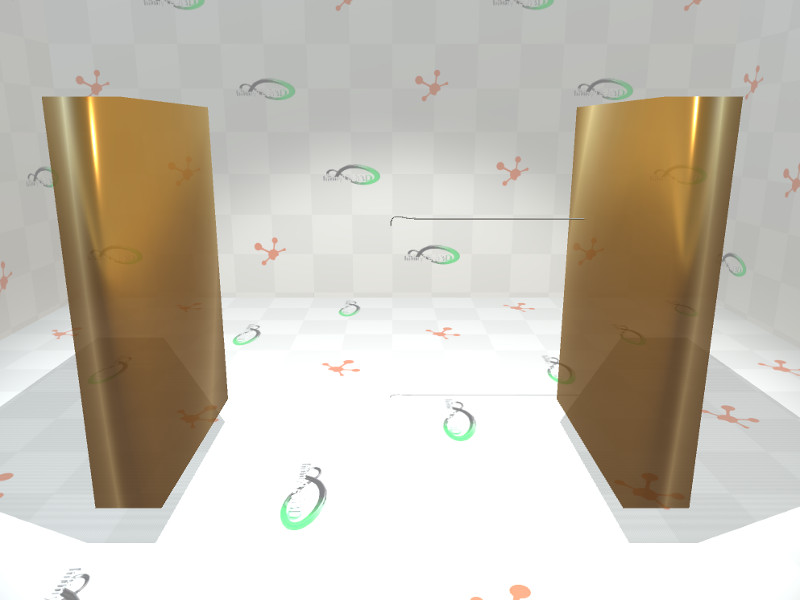
From left to right demo scenes to test geomagic motion (01-Geomagic-Motion), contact force feedback with rigid floor and cube (02-Geomagic-RigidContacts) and finally contact with 2 rigid walls (03-Geomagic-RigidCubes).
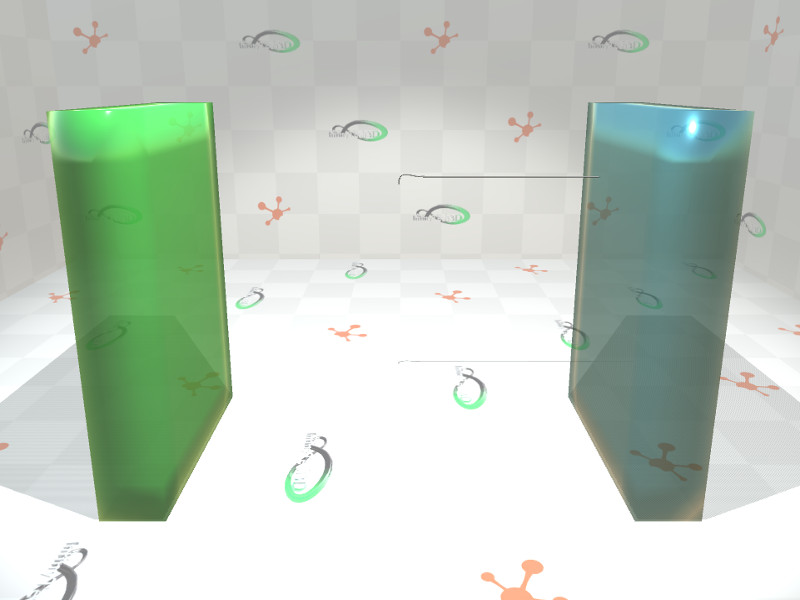
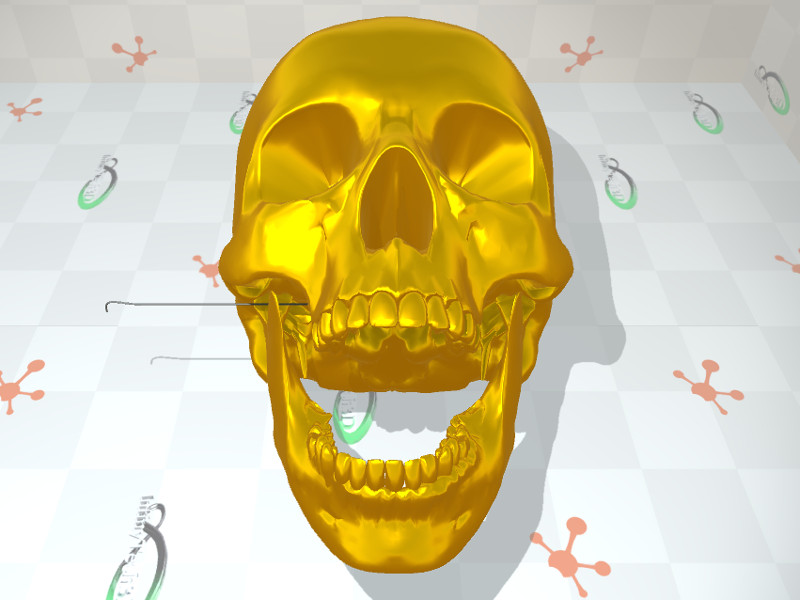
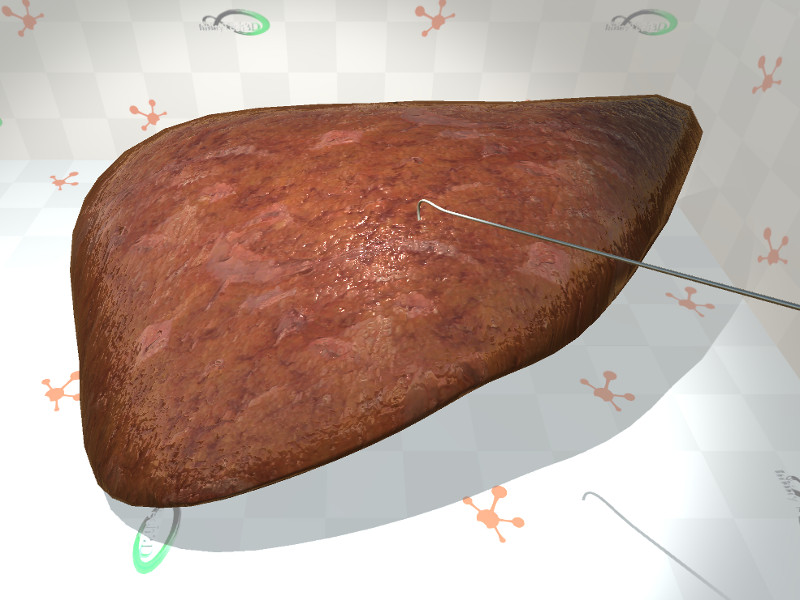
Those scenes demonstrate more advanced contacts with 2 deformable walls (04-Geomagic-DeformableCubes), a rigid skull (05-Geomagic-RigidSkull) and a deformable 3D liver model (06-Geomagic-DeformableLiver).
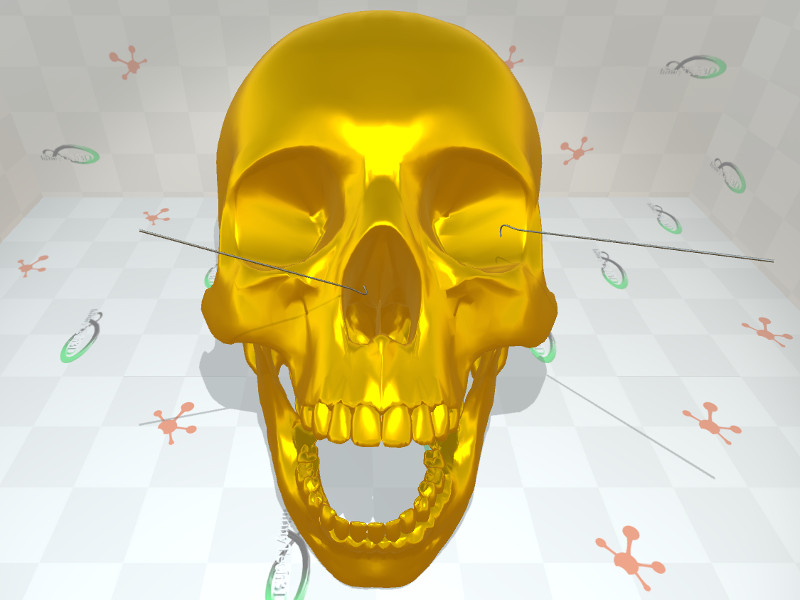

Geomagic ADVANCED EXAMPLE


Example on how to use device button with unity interaction. See first image below where bubbles appear when tool button is pushed. And on the SOFA side, it is also possible to activate interaction like carving as shown in the 2nd image.