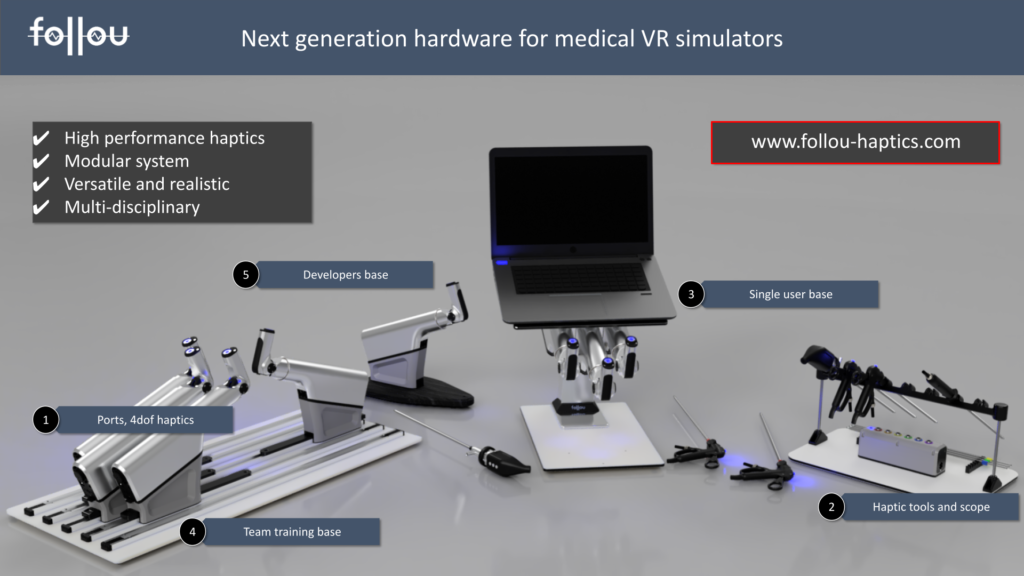
FOLLOU Haptic AVATAR DEVICE Controller
This section illustrate the scenes located in SofaUnity/Scenes/Demos/Haptic/HapticAvatar/ . Those scenes integrate the SOFA Follou Haptic Avatar plugin allowing to interface haptic devices such as graspers, scissors and camera with 6 dofs from the company Follou with SOFA simulation.
- More details can be found here: https://www.sofa-framework.org/applications/marketplace/follou-avatar-haptics/
- Code of the plugin is available here: https://github.com/sofa-framework/SofaHapticAvatar
- Full documentation is available here: SofaHapticAvatar_documentation.pdf
This feature is available in the trial version but for extended academic or commercial use, this feature is subject to an additional license. See the licenses page for more details.
Haptic Avatar Tool Controller
In this asset, contrary to the Geomagic Touch integration, no additional controller is needed in the Unity scene. All the configuration need to be done directly in the SOFA scene before parsing using for example (see SOFA scene creation in documentation):
- <HapticAvatar_PortalManager name=”portalMgr” configFilename=”./config/PortalSetup.xml” />
- <HapticAvatar_DeviceController name=”HADevice” portName=”//./COM3″ portalManager=”@portalMgr” />
- <HapticAvatar_IBoxController name=”HAIBox” portName=”//./COM5″ />
The device is modelized in SOFA using an Articulated System Mapping mechanism.
Haptic Avatar Demo Scenes
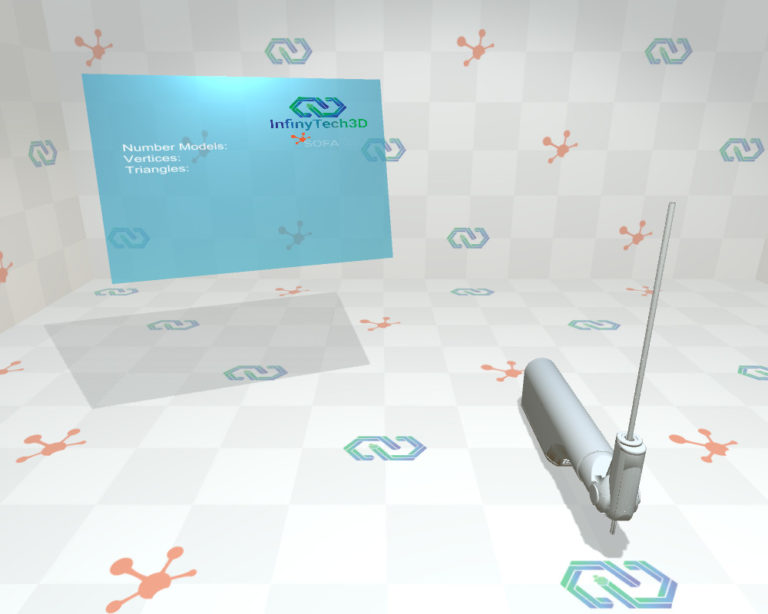
There is From left to right demo scenes to test Haptic Avatar motion (Demo_01_SingleGrasper-motion), contact force feedback with rigid floor (Demo_02_SingleGrasper-rigidFloor) and finally contact with a rigid floor and a rigid cube (Demo_03_SingleGrasper-RigidCube).
There is a set of demo scene available directly for one or two devices. They start from simple motion demo like the one on the left called: Demo_01_SingleGrasper-motion to interaction with rigid and deformable bodies.
Here is the full list with explicit names:
- Demo_01_SingleGrasper-motion
- Demo_02_SingleGrasper-rigidFloor
- Demo_03_SingleGrasper-RigidCube
- Demo_04_SingleGrasper-DeformableCube
- Demo_05_SingleGrasper-RigidCactus
- Demo_06_SingleGrasper-DeformableCactus
- Demo_07_SingleGrasper-DeformableLiver
- Demo_10_DualGraspers-motion
- Demo_11_DualGraspers-RigidFloor
- Demo_12_DualGraspers-RigidCube
- Demo_13_DualGraspers-DeformableCube
- Demo_14_DualGraspers-DeformableTorus
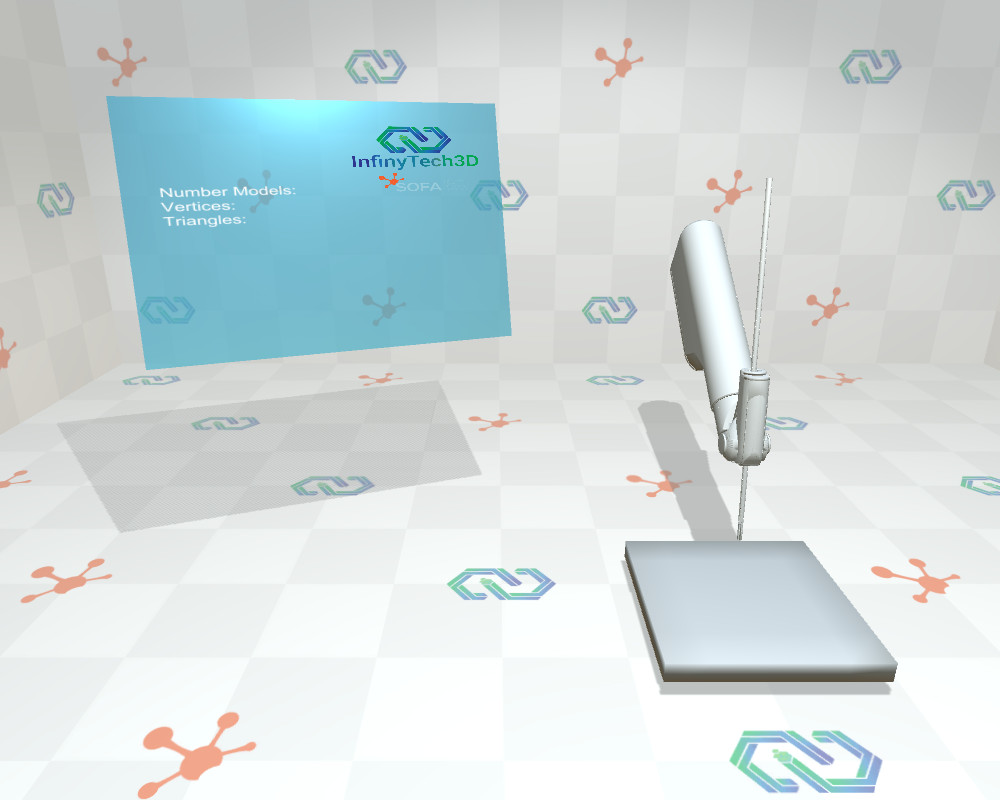

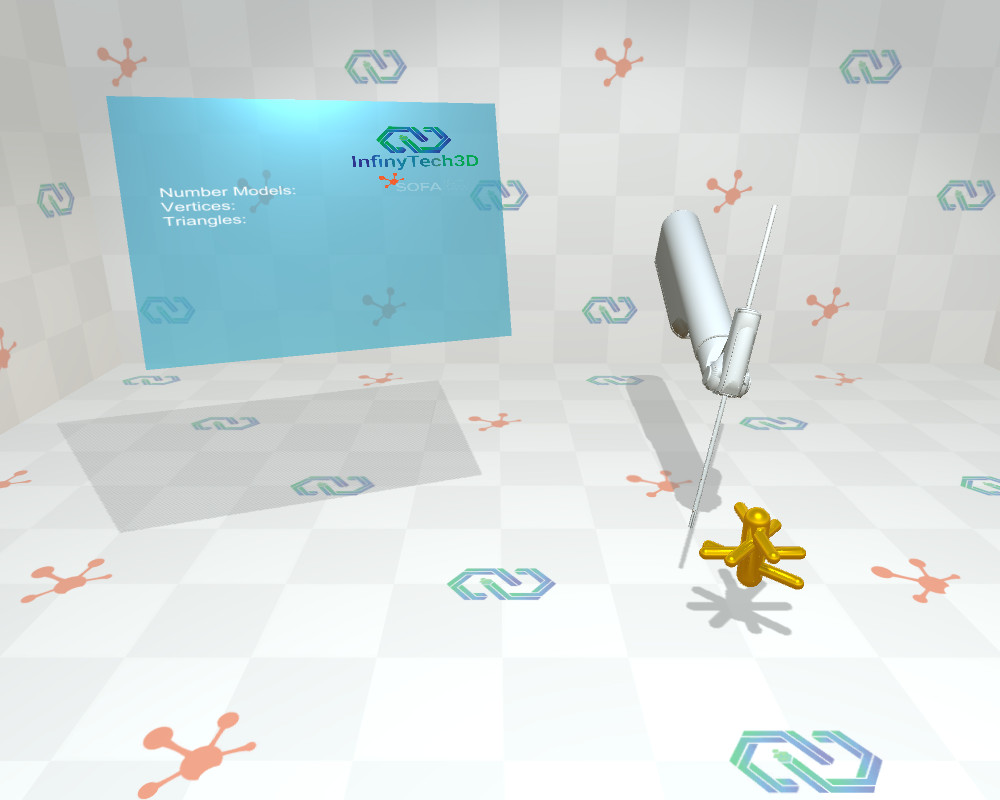
From left to right demo scenes to test Haptic Avatar against rigid objects like a floor (Demo_02_SingleGrasper-rigidFloor), contact force feedback with rigid cube (Demo_03_SingleGrasper-RigidCube) and finally contact with a rigid cactus (Demo_05_SingleGrasper-RigidCactus).
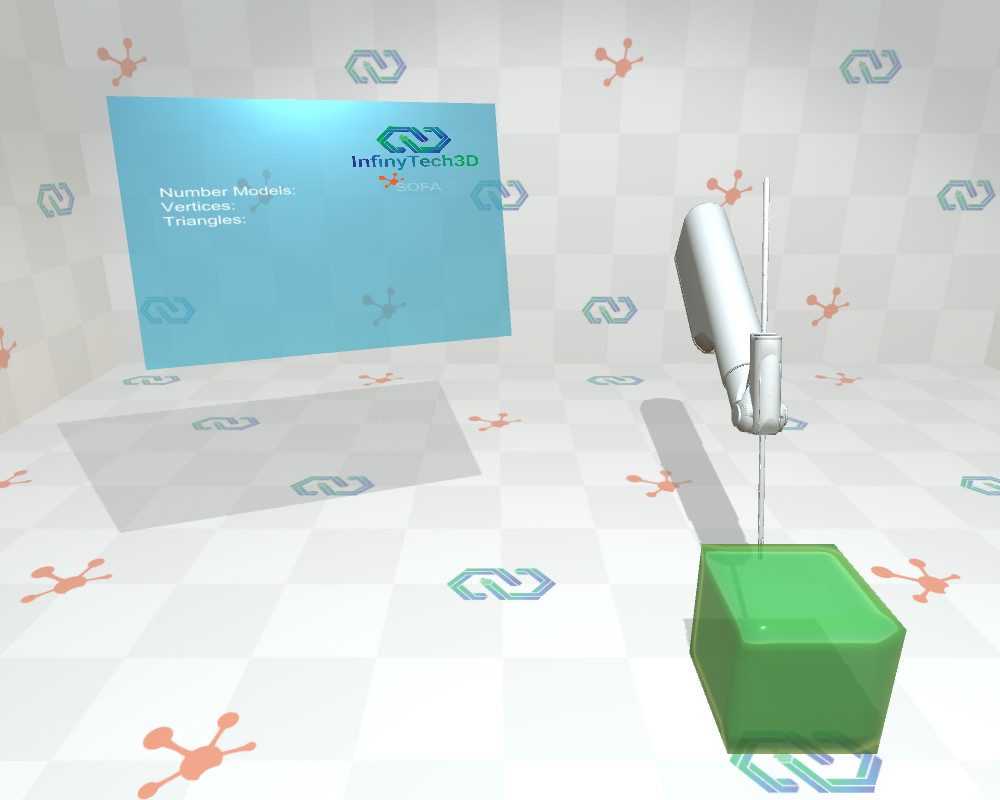

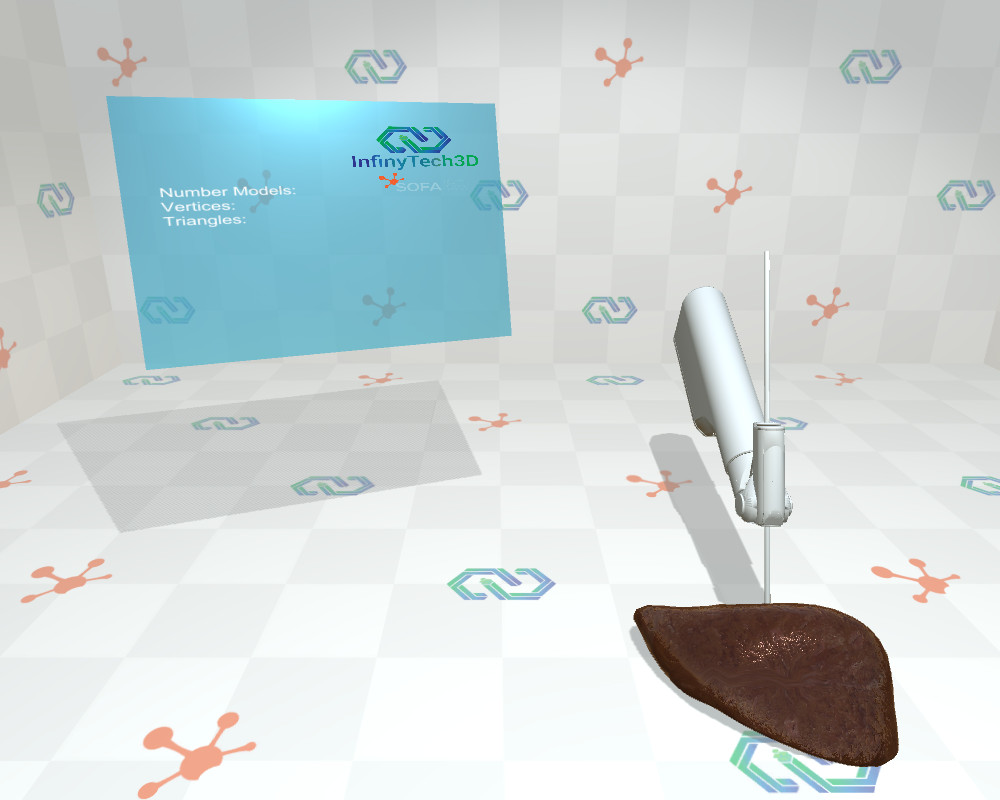
Similarly from left to right demo scenes to test Haptic Avatar force feedback against deformable objects like a cube (Demo_04_SingleGrasper-DeformableCube), contact force feedback with deformable cactus (Demo_06_SingleGrasper-DeformableCactus) and finally contact with a liver organ (Demo_07_SingleGrasper-DeformableLiver).
Haptic AVATAR ADVANCED INTEGRATION
Here is a link to a demo movie of two Haptic Avatar devices interacting with a liver modelized using FEM and with constraint respect to neighbored anatomical structures. The full demo is simulated inside SOFA and rendered using HDRP in Unity.