This section illustrate the scenes located in SofaUnity/Scenes/Demos/Endoscopy/BeamAdapter/. Those scene integrate the SOFA BeamAdapter plugin allowing to have a dynamic implementation of the FEM beam elements. More details can be found here: https://github.com/sofa-framework/BeamAdapter
In those examples, Unity is used to control the BeamAdapter naviguation and also attach camera at the tip of the tool.
01. BeamDemo_01_Texture
This first scene shows how to setup a BeamAdapter model and control it using the keyboard. To reproduce this scene:
Create a SofaContext in the Unity scene.
Load the SOFA simulation scene with the catheter modelized using BeamAdapter plugin.
In the unity hierarchy scene identify the Node modelizing the catheter mesh shape. In this example it corresponds to the “SofaNode – Collision”.
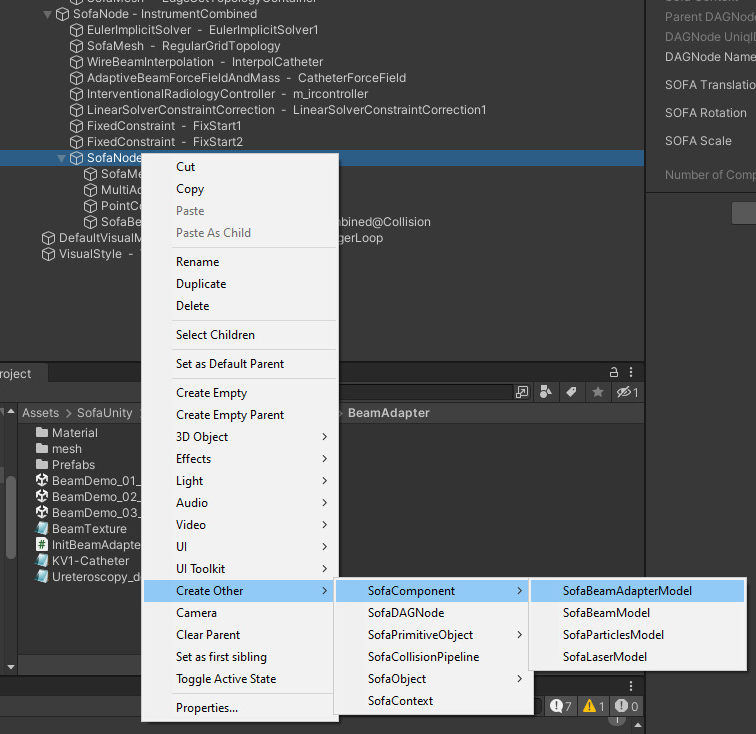
Add a SofaBeamAdapterModel to this Node using right click -> Create Other -> SofaComponent -> SofaBeamAdapterModel
Use key arrows to control the catheter during Play mode:
Arrow Up: Deploy the catheter
Arrow Down: Retract the catheter
Arrow Left or Right: Twist the catheter
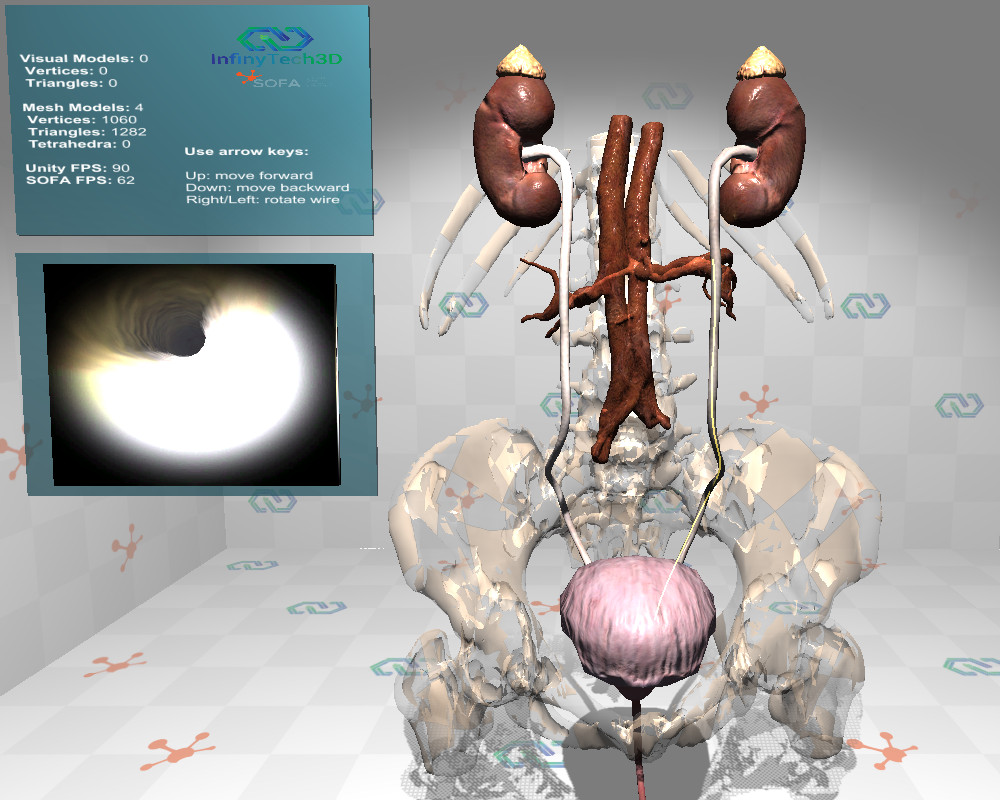
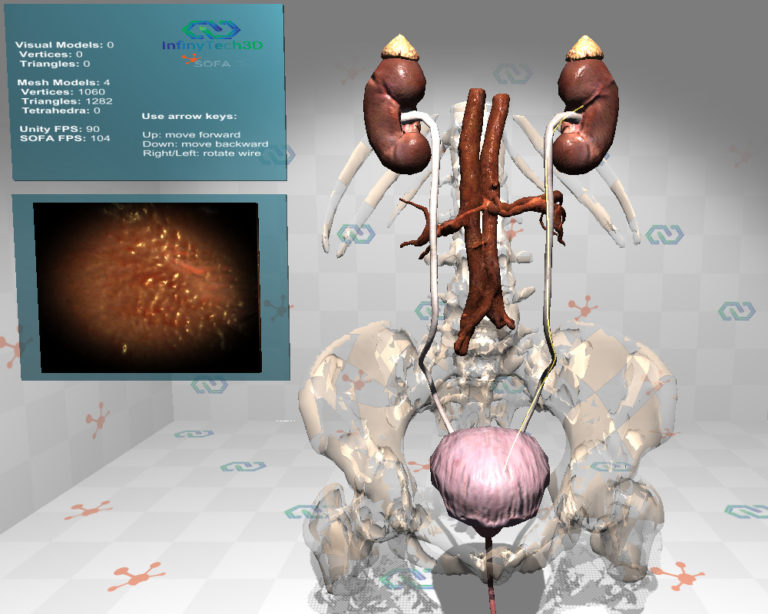
02. BeamDemo_02_KV1
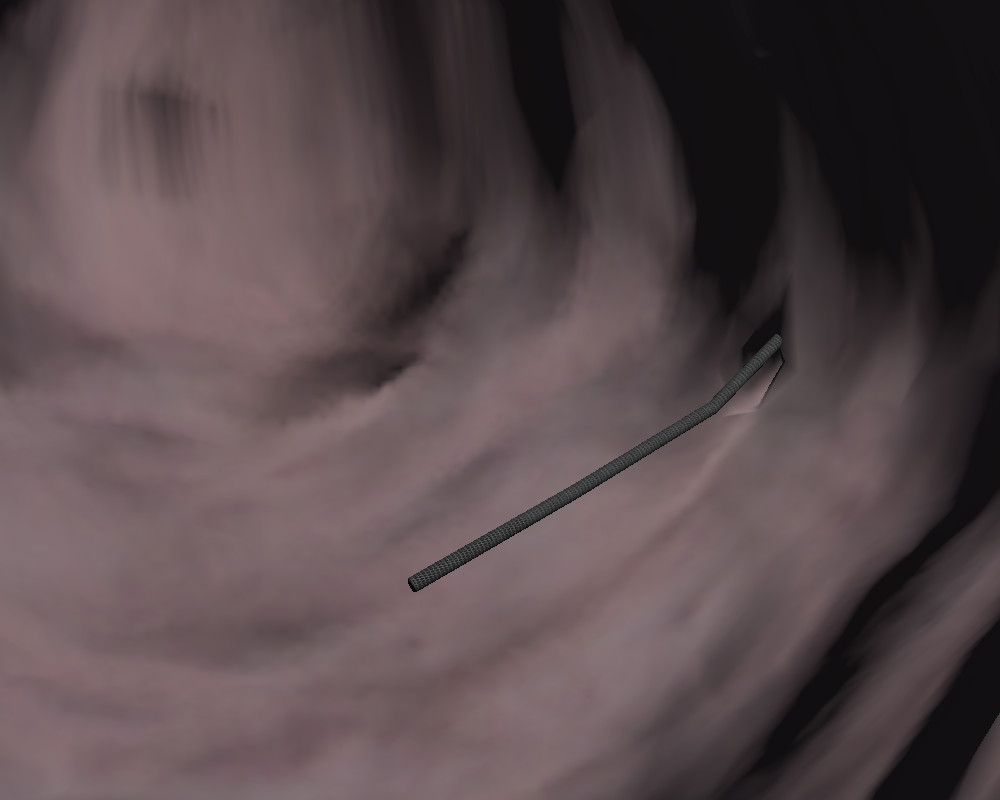
In this second example we add a SofaBeamAdapterModel and use it to deploy a catheter inside an ureter 3D model to the right kidney.
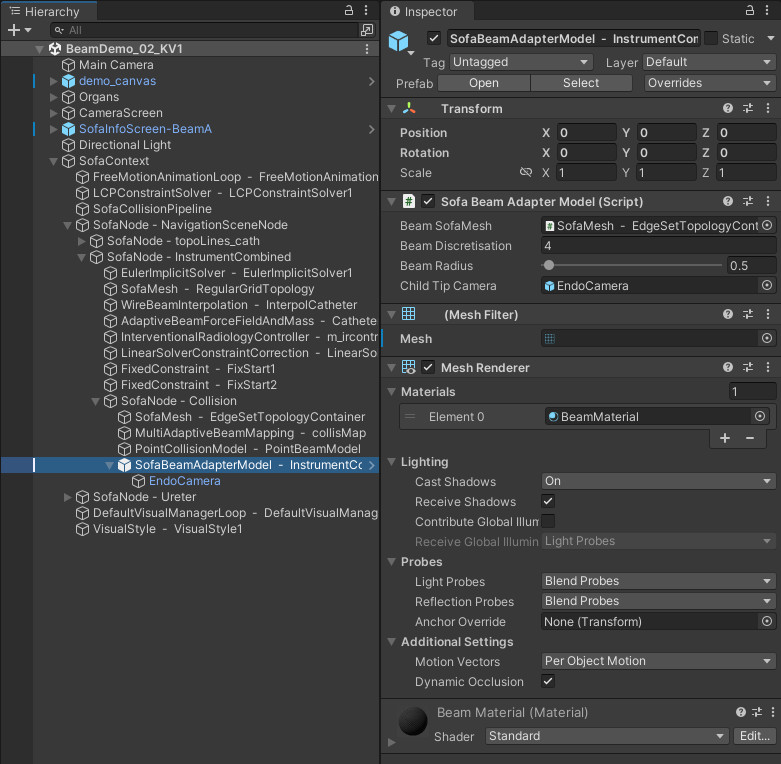
After adding the SofaBeamAdapterModel into the Unity scene, it is possible to parametrize it using it’s UI:
Beam SofaMesh: Link to the SofaMesh of the Beam.
Beam Discretisation: Number of points used to define the cylinder geometry of the beam.
Beam Radius: radius of the visual cylinder defining the beam.
Child Tip Camera: link to an object that will be placed at the tip of the catheter during the simulation
In this example a camera is placed at the tip of the catheter to dispay the device progression on the screen.
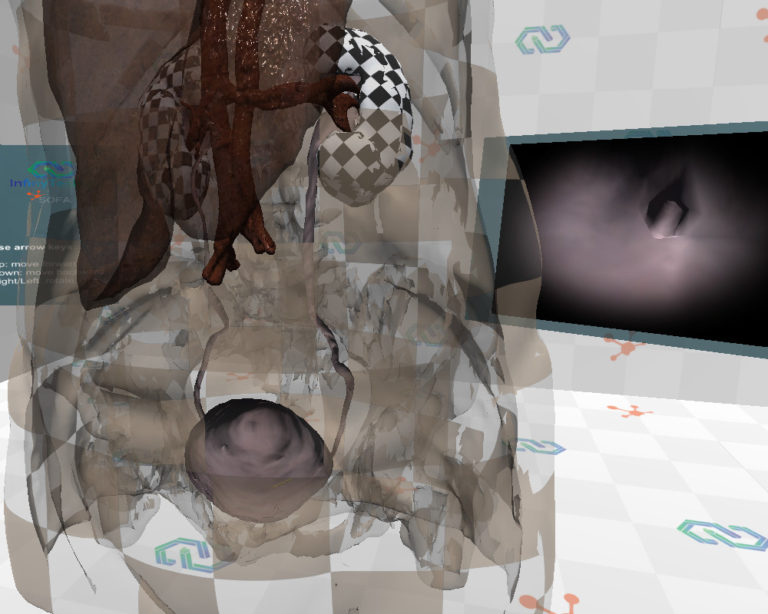
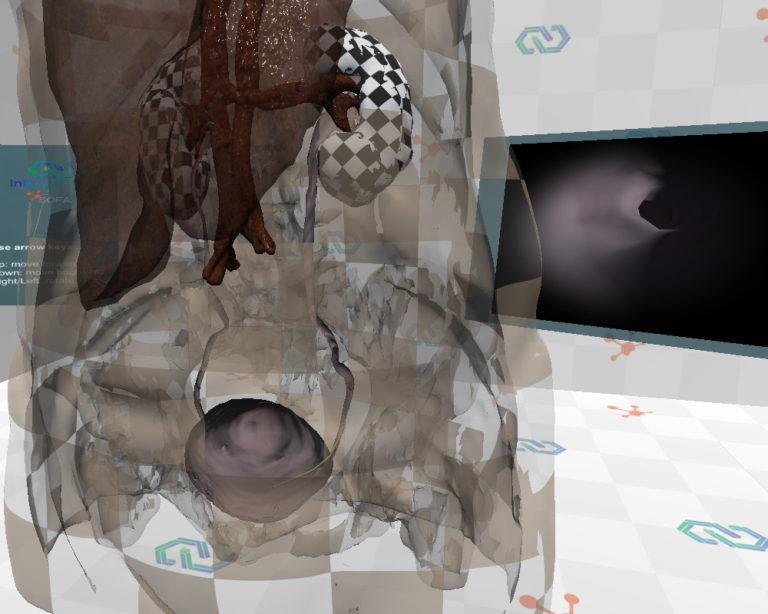
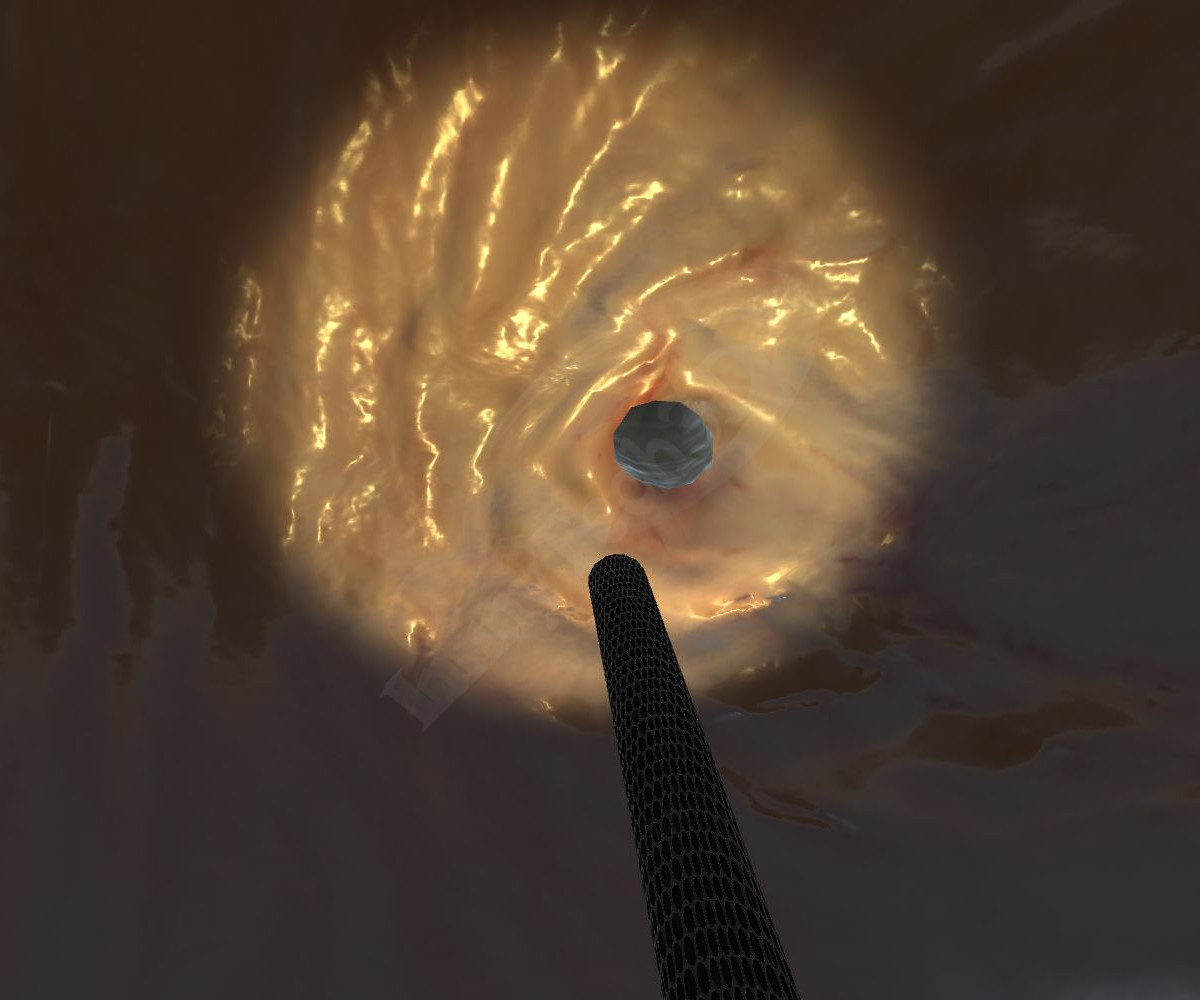
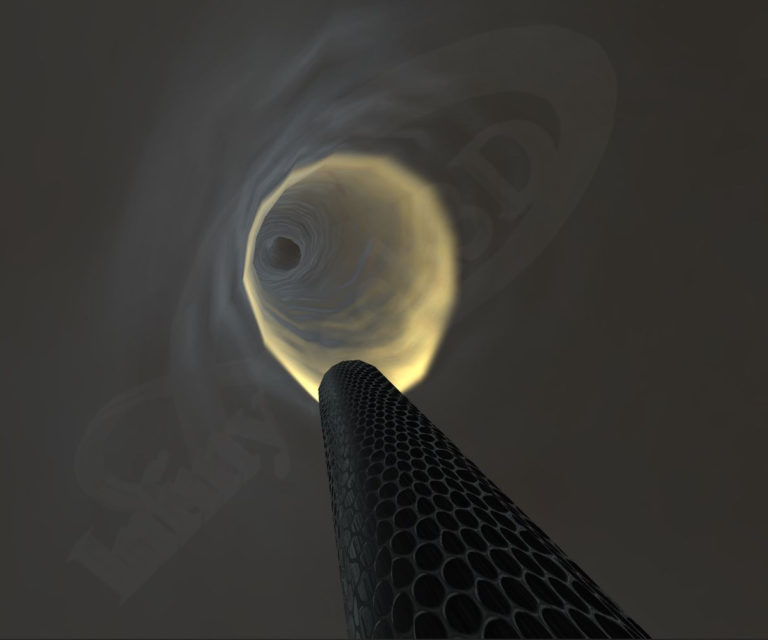
03. BeamDemo_03_Ureteroscopy
This last scene is illustrating another demo of catheter deployment in ureter 3D models using the SofaBeamAdapterModel with a camera on the tip. Use the keyboard to control and deploy the catheter. Below are images and movie of the results.
Full demo movie of the endoscopic navigation simulation.
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.