DLC - 3D Organs models
This asset provides a collection of high-quality 3D organ models, each available in both high-resolution (with textures for detailed rendering) and low-resolution versions (optimized for faster computation in physics deformation or collision models). These models are seamlessly integrated into SOFA simulation scenes and come with several Unity example projects for easy use.
Included Organ Models in the asset:
- 2 Lungs
- Heart
- Diaphragm
- Liver
- Gallbladder
- Stomach
- Spleen
- Pancreas
- 2 Kidneys
- Intestine
Additionally, the asset includes a 3D tetrahedral mesh of the liver with approximately 6,000 tetrahedra for realistic volume-based simulations.
Available Example Scenes:
- Example_01_Organs_GridTopology.unity
A demonstration of grid-based topologies for organ simulations. - Example_02_Organs_LiverVolume.unity
Showcasing volume-based deformation of the liver model using the tetrahedral mesh. - Example_03_Organs_SphereCollision.unity
Illustrates collision detection between organs and spherical objects. - Example_04_Organs_VR.unity
A VR-ready scene for interacting with the 3D organ models in a virtual environment.

01. Example_01_Organs_GridTopology
This first scene demonstrates how to simulate all 3D organ models in SOFA and render them in Unity with optimized FPS for interactive simulation.
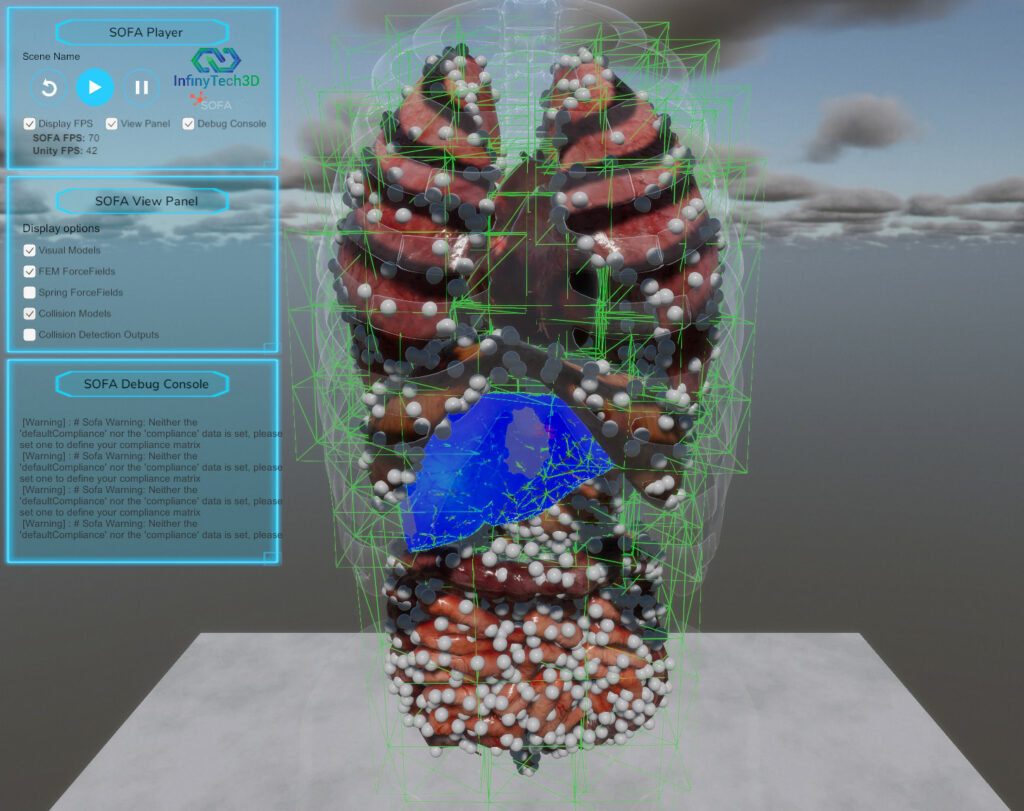
In this example, each organ is simulated using SOFA’s SparseGridTopology and HexahedronFEMForceField (see figure 2 below). The mechanical models drive the physics-based simulation, while fine-detail models are used for visual rendering, complete with textures for realistic appearance (see figure 1 below).
Additionally, rougher models are employed to handle the simulation of collisions between organs (see figure 3 below), optimizing performance without sacrificing interactivity.
For demonstration purposes, a force field is applied to the lungs and heart to simulate breathing and heartbeats, showcasing how external forces can be used to create dynamic and lifelike animations within the simulation.
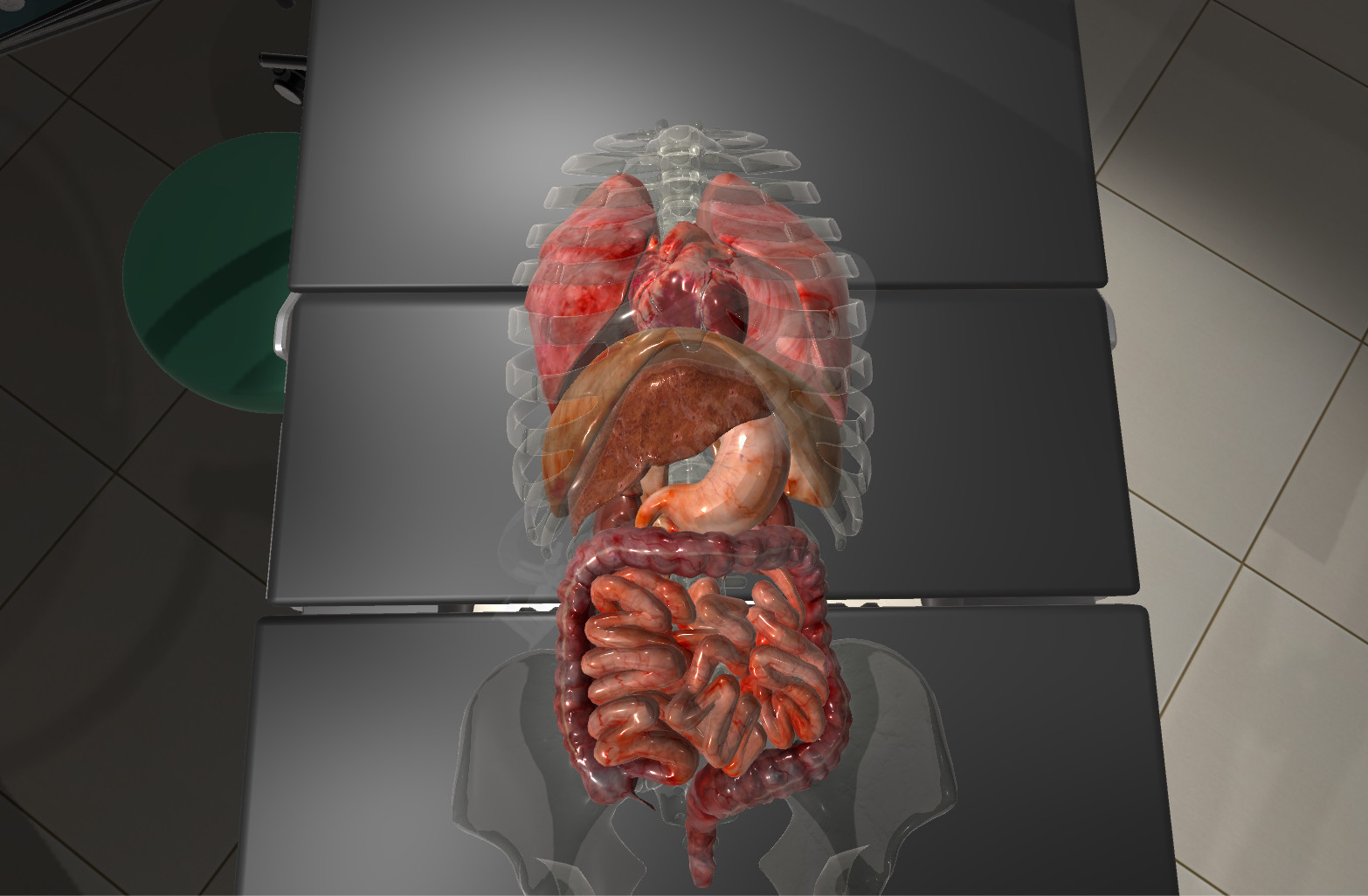
Figure 1: Visual Models with texture display
Figure 2: Hexahedron FEM Grids display
Figure 3: Reduced meshes for Collision Model (in green)
02. Example_02_Organs_LiverVolume
In this second scene, the liver is modeled using a tetrahedral volume mesh (~6K tetrahedra) paired with a TetrahedronFEMForceField for simulating its physical deformation. A surface mapping technique is applied to compute the triangulation of the mesh surface (shown in green in figure 1). This surface mesh serves a dual purpose: visual rendering and as a surface collision model for more accurate interactions.
The other organs in the scene are modeled using SOFA’s SparseGridTopology and HexahedronFEMForceField (see figure 2 below). As in the previous example, fine-detail models are mapped to these mechanical structures for visual representation, complete with detailed textures.
In this example, SphereCollisionModel is used on the liver’s mesh vertices to handle collisions between the organs (see figure 3 below). This approach significantly improves performance due to its simplicity, but at the cost of precision compared to rough surface mesh models.
Figure 1: Visual Models with texture. The surface of the Liver is rendered in green wireframe
Figure 2: Hexahedron FEM Grid display as well as Tetrahedron FEM of the Liver
Figure 3: Sphere Collision models display. Liver collision model correspond to the green triangulation
03. Example_03_Organs_SphereCollision
In this scene, all organs are modeled similarly to the previous examples, utilizing SOFA’s SparseGridTopology and HexahedronFEMForceField for their mechanical behavior. The liver, as in Example 02, is modeled using a tetrahedral volume mesh (~6K tetrahedra) with a TetrahedronFEMForceField to simulate its deformation. Triangular rough models are used to handle the collision simulation.
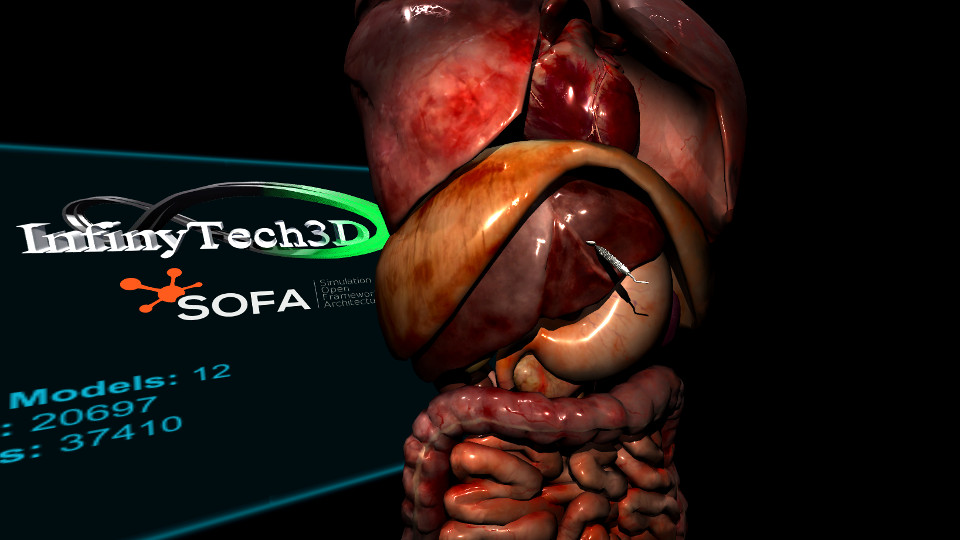
The key feature in this example is the integration of a SphereCollisionModel to demonstrate the interaction capabilities with a virtual tool. This collision model showcases how external objects, such as a tool, can interact with the organ models through SOFA’s physics engine.
The sphere can be controlled via a SofaRigidController (see figure 1 below) using keyboard inputs. This controller must be properly placed on the SphereCollisionModel within the scene hierarchy (see figure 2 below).
This example serves as a practical demonstration of how external objects can interact with SOFA’s simulated organs and highlights the potential for interactive tool-based manipulation within a simulation.
The sphere can be controlled via a SofaRigidController (see figure 1 below) using keyboard inputs. The following keys allow for movement and rotation of the sphere in the scene:
- Key 8: Move up | Key 7: Rotate up
- Key 2: Move down | Key 9: Rotate down
- Key 4: Move left | Key 1: Rotate left
- Key 6: Move right | Key 3: Rotate right
- Key 5: Move forward | Key +: Rotate forward
- Key 0: Move backward | Key -: Rotate backward
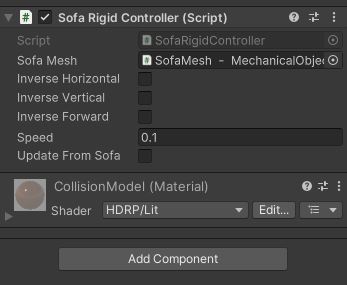
Figure 1: SofaRigidController Inspector. This component control the motion of a SOFA rigid DOF using keyboard
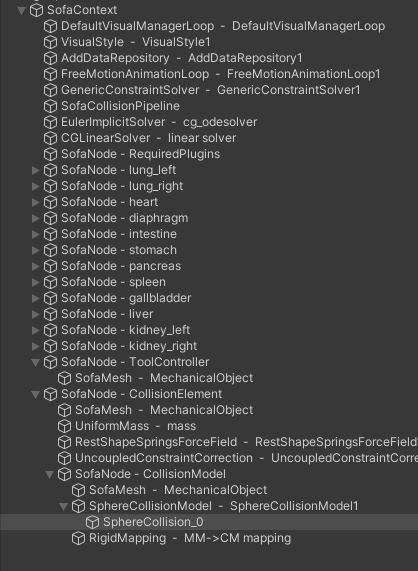
Figure 2: Sphere Collision models Element aside the Organs modelization
04. Example_04_Organs_VR
In this example, the organ models are identical to those used in previous scenes, relying on SOFA’s SparseGridTopology, HexahedronFEMForceField, and the TetrahedronFEMForceField for the liver. The visual models are also mapped onto their respective mechanical models, ensuring realistic physics-based interactions.
However, this scene has been specifically optimized for Virtual Reality (VR). The main adjustments include performance optimizations of the 3D models to maintain a high frame rate, ensuring smooth interactions in a VR environment. Additionally, standard Unity XR components have been integrated, allowing users to experience and interact with the organ simulations in VR.
This setup supports common VR headsets and controllers, enabling immersive interaction with the simulation, where users can explore the organs in real-time, manipulate the virtual environment, and visualize soft-tissue dynamics from a first-person perspective. Below are some examples of interaction (not included in the asset).
Full demo movie of the organs.